问题2:平衡车测试程序——调试模式使用说明
本文最后更新时间:2025.9.12
版本说明
本文以“平衡车测试程序-V1.0”版本为例进行讲解,相关程序可以在“平衡车入门教程资料/程序源码”目录下找到。
调试模式说明
在平衡车主界面单击K4按键,可以进入调试模式,调试模式界面如下图所示,调试模式包含“硬件测试”和“传感器校准”两个功能,按K1按键进入硬件测试,按K2按键进入传感器校准,在调试模式中,长按K4按键可以返回。
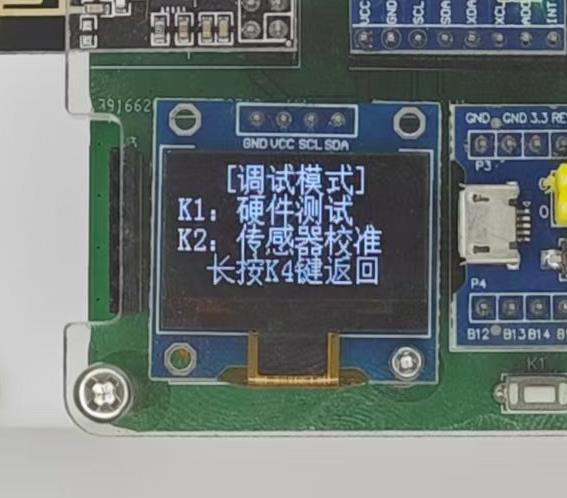
调试模式界面
硬件测试
硬件测试可以对平衡车硬件进行单独调试,验证硬件是否可以正常工作。在平衡车开发中,如果你怀疑硬件可能出现了问题,则可以到此硬件测试中,单独测试一下硬件。
在硬件测试界面中,单击K4按键可以切换测试项目,长按K4按键可以返回。
1. 编码电机测试
此处通过手动输出PWM,观察电机旋转情况和编码器读取数值判断硬件是否正常。
屏幕上PWML和R是输出给左右电机的PWM值,SpdL和R是编码器测量得到的速度值,LocL和R是编码器速度值累加得到的位置值。
按下K1按键,左右两个电机PWM正向变化,按下K2按键,PWM反向变化,按下K3按键,PWM归零。
在按键控制PWM时,观察电机的旋转和编码器测量值是否正常。PWM为正时,电机应该正转,同时编码器测量值也应为正值,PWM为负时,电机应该反转,同时编码器测量值也应为负值。
电机测试视频演示
2. MPU6050测试
此处通过读取MPU6050的原始数据和ID号判断硬件是否正常。
屏幕上最左侧3个值是读取MPU6050的3轴加速度值,中间3个值是读取MPU6050的3轴角速度值,最右侧的1个值是读取MPU6050的芯片ID号。
摇动平衡车,观察加速度值和角速度值是否变化,若变化,则表示MPU6050正常。
MPU6050测试视频演示
3. NRF24L01测试
此处通过读写NRF24L01的寄存器判断硬件是否正常。
屏幕上W后的数值表示写入寄存器的值,R后的数值表示读取寄存器的值。
按下K1按键,增加写入数据,按下K2按键,减小写入数据。
在按下K1和K2按键后,观察W和R的数值是否一致,若一致,则表示NRF24L01正常。
NRF24L01测试视频演示
4. 串口测试
此处通过发送一个字节和接收一个字节判断硬件是否正常。
屏幕上TX1为USART1发送数据,RX1为USART1接收数据,TX2为USART2发送数据,RX2为USART2接收数据。USART1对应控制板右侧的串口排针,USART2对应控制板左侧的蓝牙串口排座。
按下K1按键,增加TX1和TX2测试数据,按下K2按键,减小TX1和TX2测试数据,按下K3按键,同时发送TX1和TX2数据。
测试时,可以分别把USART1、USART2的TX引脚和RX引脚短接,自发自收。若按下K3后,对应的RX数据与TX数据一致,则表示串口正常。
串口测试视频演示
传感器校准
由于姿态传感器MPU6050的原始数据有零漂,以及安装位置有误差等原因,使用平衡车之前,需要对姿态传感器进行校准。
此处需要校准的值为Y轴角速度零漂和中心角度误差。屏幕上显示的GY是Y轴角速度值,Angle是中心角度值。
校准时,请找一处竖直的墙角、柱子、桌腿等地点,将平衡车侧面紧贴在竖直的参考线上,保持平衡车绝对竖直,且保持平衡车绝对静止,随后单击K4按键确认,即校准完成,长按K4按键可以退出校准。
注意:校准时,请勿将平衡整体贴到墙壁上,因为平衡车轮子比车体更宽,如果整体贴到墙壁上,校准值会不准确,此时校准反而会起反作用。
校准值会存储在STM32的内部FLASH中,掉电不丢失。当平衡车实际运行时,读取的GY和Angle将会减去存储的校准值,以消除零漂和误差。
传感器校准视频演示
< 返回