问题1:PID综合测试程序——硬件测试使用说明
本文最后更新时间:2025.2.19
准备工作
1. 下载PID入门教程的配套资料,在“PID入门教程资料/程序源码/00-PID综合测试程序”文件夹下找到PID综合测试程序,打开其中任意一个版本的程序工程(本文以V1.1版本为例),编译成功后,使用ST-LINK将程序烧录到STM32中。
2. 拔掉ST-LINK,仅使用电源适配器供电,确保12V的电源有电。
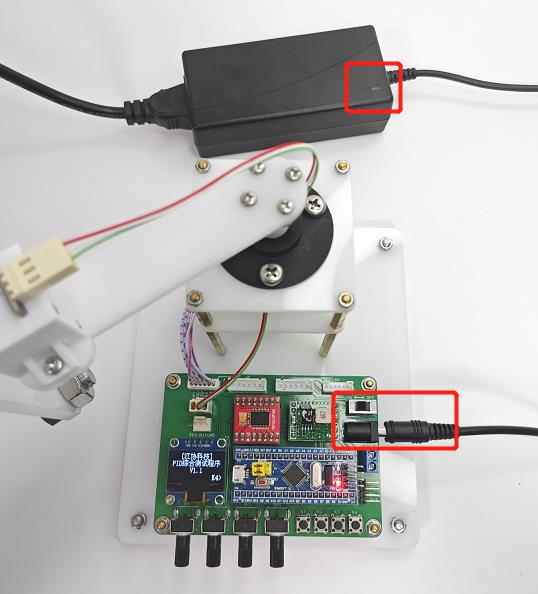
硬件连接(确保12V的电源有电)
3. 按K4按键进入选择系统界面,再按K1按键进入硬件测试。
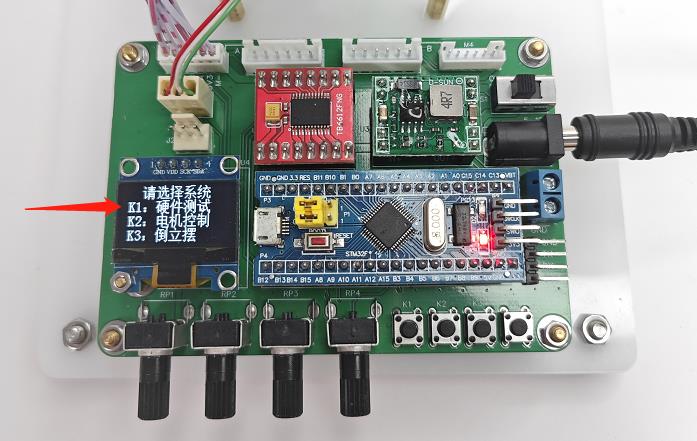
进入硬件测试
4. 在硬件测试界面,右下角提示按K4按键进行翻页,左下角显示当前页面,总共有6页测试内容。
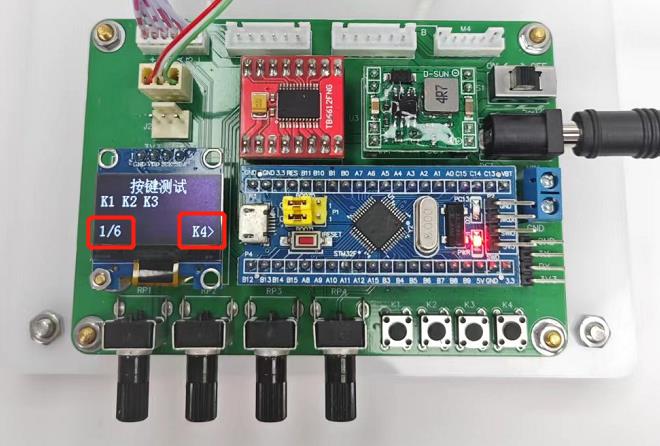
K4按键翻页,左下角显示当前页面
测试方法
1. 按键测试。
按下K1、K2、K3按键,OLED显示的对应字符会反色闪烁一次。
按键测试视频演示
2. 电位器测试。
依次拧动左下角的电位器旋钮,OLED显示的对应数值会在0~4095之间变化,拧到最左为0,拧到最右为4095,数值有一些波动,属于正常现象。
电位器测试视频演示
3. 电机测试。
按下K1按键,速度正向变化,按下K2按键,速度反向变化,按下K3按键,速度归零。
要驱动电机,必须接通12V的电源适配器,如果仅使用ST-LINk供电,则电机不会转动或者只会缓慢转动。
OLED屏幕上显示的MA为左上角两个电机接口(M1和M3)的速度,MB为右上角两个电机接口(M2和M4)的速度。
由于摩擦力的存在,速度值较小时,电机可能不会转动,又因为硬件和电机参数的差异,不同设备的电机转和不转的速度阈值可能有所不同,这些都是正常现象。
电机测试视频演示
4. 编码器测试。
用手直接旋转倒立摆的横杆,使电机转动起来,顺时针旋转时,对应编码器数值正向变化,逆时针旋转时,对应编码器数值反向变化,横杆旋转一整圈,数值变化408。
OLED屏幕上显示的EA为左上角两个电机接口(M1和M3)的编码器数值,EB为右上角两个电机接口(M2和M4)的编码器数值。
由于右上角两个电机接口暂时没有接入电机,所以EB的值始终为0,这是正常现象,测试时只需观察EA的数值即可。
编码器测试视频演示
5. 角度传感器测试。
用手直接旋转倒立摆的摆杆,使角度传感器转动起来,顺时针旋转时,对应的AD值从0依次变化到4095。
OLED屏幕上显示的AD1为靠上的角度传感器接口(J1)的AD值,AD2为靠下的角度传感器接口(J2)的AD值。
由于J2接口暂时处于悬空状态,所以AD2数值会乱跳,这是正常现象,测试时只需观察AD1的数值即可。
当摆杆竖直向下时,角度传感器处于盲区位置,此时的AD值无意义,由于角度传感器输出有滤波电容,因此AD值会缓慢向2048靠近,这是正常现象。
角度传感器测试视频演示
6. 串口测试。
按下K1按键,TxData数据加1,按下K2按键,TxData数据减1,按下K3按键,串口将TxData数据发送出去,同时TxData数据反色闪烁一次。当串口收到一个字节数据后,接受到的数据会显示在RxData位置,同时RxData数据反色闪烁一次。
简单测试时,可用导线或者跳线帽将TX引脚和RX引脚短接起来,自发自收,这样,每次按K3按键时,TxData的数据会显示到RxData位置。
正常测试时,可以使用USB转串口模块,将PID入门套件与电脑的串口助手相连,默认波特率为9600,数据模式为HEX模式。按K3按键时,TxData会发送到串口助手的接收区,串口助手发送一个字节数据时,RxData会收到并显示这个字节数据。
串口测试视频演示
< 返回