问题3:PID综合测试程序——倒立摆使用说明
本文最后更新时间:2025.2.19
准备工作
1. 下载PID入门教程的配套资料,在“PID入门教程资料/程序源码/00-PID综合测试程序”文件夹下找到PID综合测试程序,打开其中任意一个版本的程序工程(本文以V1.1版本为例),编译成功后,使用ST-LINK将程序烧录到STM32中。
2. 拔掉ST-LINK,仅使用电源适配器供电,确保12V的电源有电。
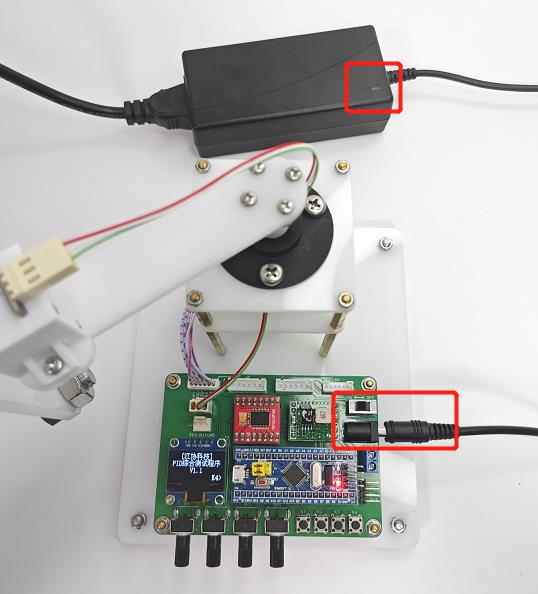
硬件连接(确保12V的电源有电)
3. 按K4按键进入选择系统界面,再按K3按键进入倒立摆。
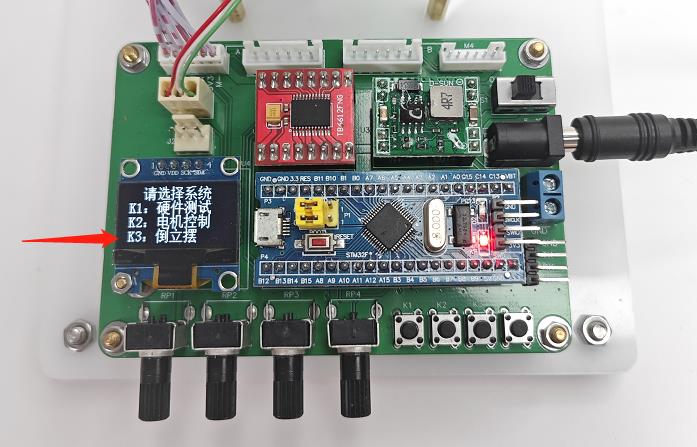
进入倒立摆
操作说明
1. 在倒立摆界面,屏幕左侧显示的是角度环参数,角度环通过角度传感器获得,目的是保持摆杆倒立稳定,屏幕右侧显示的是位置环参数,位置环通过电机编码器获得,目的是保持横杆位置稳定。通过板子右下角的4个按键和左下角的4个电位器,可以操作设备和调节参数。
K1:按下一次,倒立摆程序开始运行,再次按下,倒立摆程序暂停运行,STM32板子上PC13端口的LED灯指示当前倒立摆程序运行状态。
K2:在倒立摆启摆并保持稳定后,按下一次,倒立摆位置顺时针旋转一周。
K3:在倒立摆启摆并保持稳定后,按下一次,倒立摆位置逆时针旋转一周。
K4:进行参数调节,依次单击K4,分别调节角度环Kp、Ki、Kd参数、位置环参数Kp、Ki、Kd和更多系统参数(更多系统参数V1.0版本程序不支持)。

OLED显示角度环和位置环参数,按键和电位器操作设备和调节参数
2. 当处于角度环或位置环Kp、Ki、Kd参数调节界面时,OLED上的对应数值会有矩形框提示,此时RP1电位器调节Kp参数,RP2电位器调节Ki参数,RP3电位器调节Kd参数,RP4暂时没用。当数字的矩形框为空心时,表示电位器的位置不正确,缓慢拧动电位器,直到矩形框变为实心,随后电位器即可调节对应的参数。
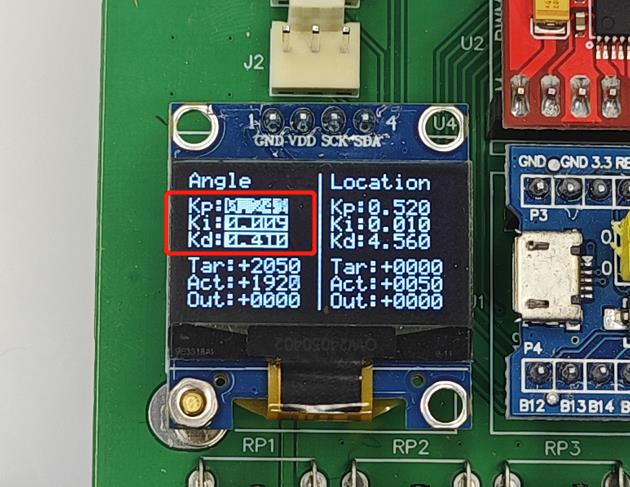
缓慢拧动对应的电位器,当矩形框变为实心时,即可调节参数
3. 当处于更多系统参数调节界面时,OLED上会显示一个菜单列表,此时K1为上移位置,K2为下移位置,K3为选中参数。当选中某一项后,此项数值会显示左右两个箭头,此时K1为减小数值,K2为增大数值,K3为确认修改。

通过菜单调节更多系统参数
4. 以上参数调节后,当设备断电或复位,调节的参数均会丢失,使用参数保存功能可以将修改的参数保存到FLASH中,实现掉电和复位参数不丢失。
参数保存:在倒立摆界面,长按K4按键,OLED提示“已保存参数”,此时修改的参数将保存到STM32内部FLASH中,掉电和复位后不会丢失。
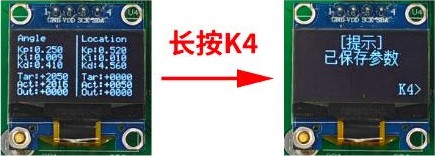
倒立摆界面,长按K4按键,参数保存
参数重置:如果修改的参数效果不理想,可以通过参数重置功能,将参数恢复到程序里指定的默认值。在选择系统界面,长按K4按键,OLED提示“已重置参数”,此时所有的参数将重置为程序里指定的默认值。另外,如果是新下载程序的STM32,其中所有的参数都可能会变成0,这时也可通过参数重置,使参数回到正确的值。
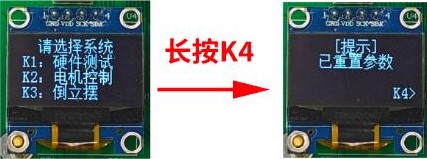
选择系统界面,长按K4按键,参数重置
调参方法
1. 角度环或位置环Kp、Ki、Kd参数调节
角度环参数可以调节摆杆立柱时的稳定程度,位置环参数可以调节横杆定位置的稳定程度,实测这些参数出厂后都不必调节,如需调节,可以自行修改尝试。
2. 中心角度调节
由于角度传感器装配差异,每个设备的中心角度值并不是完全一致的,因此需要根据设备修改合适的中心角度值。为了得到设备的中心角度,可以手动将摆杆保持竖直,此时查看角度环的Act数据,即为中心角度值,观察到的Act值会有些抖动,取个近似值即可。
中心角度值与实际有偏差会导致横杆位置顺时针旋转一圈和逆时针旋转一圈的速度不一样,偏差过大还会导致倒立摆不能正常启摆。
中心角度值的范围一般在1900~2200之间。
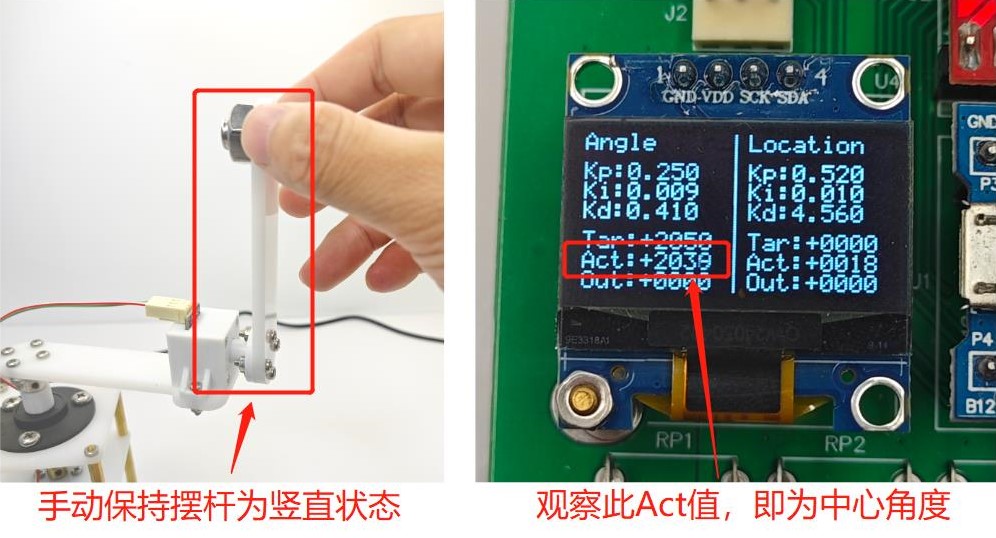
将摆杆保持竖直,角度环的Act数据即为中心角度值
3. 启动力度和启动时间调节
这两个参数作用于倒立摆启摆的时候,即每一个启摆动作时,横杆都会以启动力度值作为电机PWM,旋转启动时间值(单位:ms)这么长的时间。
启动力度越小,启摆的时候摆动越轻,启动力度越大,启摆的时候摆动越猛。如果倒立摆一直启摆,但始终摆不上去,则此时需要加大启动力度数值。如果倒立摆经常启摆过头,摆杆摆了一整圈,则此时需要减小启动力度数值。
启动力度值的范围一般在25~45之间。
启动时间一般不用过多修改,启动时间过短,力度发不出来,启动时间过长,后续达不到共振启摆的效果,如需调节,可以自行修改尝试。
启摆力度过小,摆杆摆不上去
启摆力度过大,摆杆启摆过头
4. PWM偏移
PWM偏移即输出偏移,此值用于加快PID输出值的响应速度,同时弥补电机的差异。偏移过小,横杆会低频抖动,偏移过大,摆杆会高频抖动,此值需要根据实验现象适当调节。
PWM偏移值的范围一般在0~5之间。
PWM偏移过小,横杆低频抖动
PWM偏移过大,摆杆高频抖动
最后,摆杆和横杆的抖动受多方面因素影响,要想抖动减小,需要在硬件和软件上综合调试。硬件上,保证每个螺丝拧紧,尤其是固定轴的6个顶丝,软件上,PWM偏移、角度环和位置环的PID参数,都会影响最终效果,可以自行调节,多尝试,观察现象。
< 返回